在近日举行的NVIDIA GTC 2026大会上,PICO与NVIDIA联合发布了沉浸式机器人遥操作开源方案Isaac Teleop。这不是一款单点产品,而是一套旨在解决机器人行业底层数据问题的标准化框架。
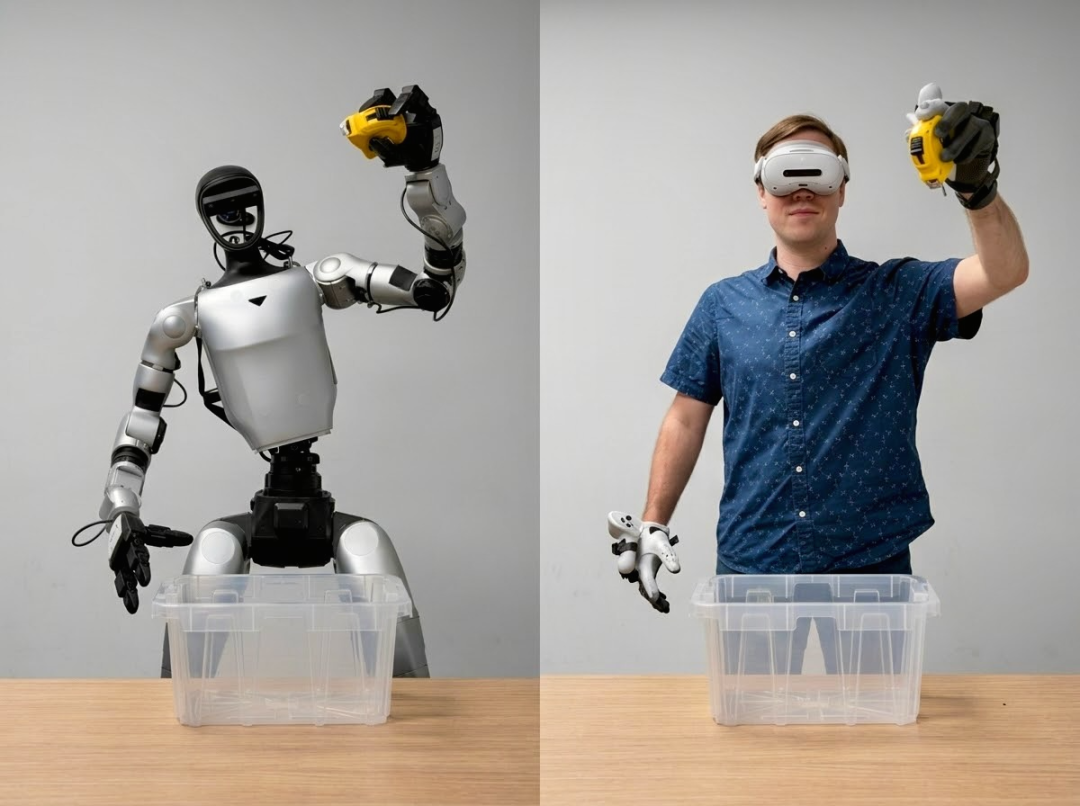
当前,物理AI(Physical AI)概念虽热,但行业普遍面临训练数据成本高昂、系统碎片化严重、仿真与真实环境相互割裂等现实痛点。PICO与NVIDIA的解法是通过XR技术打通人与机器人之间的操作闭环,将数据采集从实验室专属设备普及为开发者标配。
据悉,Isaac Teleop采用四层架构:统一设备接口,支持PICO 4 Ultra及手柄、体感追踪器实现6-DoF精准操控;提供统一运行时环境,使Isaac Lab仿真测试代码可直接用于Isaac ROS操控真实机器人;利用PICO头显的第一视角视频录制功能采集训练数据,并将上线Ego4Robo功能简化流程;同时通过火山引擎支持云端部署,降低企业硬件门槛。
PICO在机器人领域已有积累,其XRoboToolkit已服务上百家机器人组织,并获IEEE SII 2026最佳论文奖。此次与NVIDIA合作,将遥操作从本地工具拓展至云端生态。下一代头显Project Swan也将与Isaac Teleop深度集成。该方案已支持PICO 4 Ultra与WebXR接入,工具链现已开源。
短期看,它降低了数据采集门槛;中期看,标准化格式有望实现数据互通;长期若Ego4Robo成熟,人类操作视频可直接转化为机器人训练数据。不过,操作者技能带来的数据偏见以及云端部署的延迟问题,仍有待实际应用验证。(新闻来源:VRAR星球报道)
商务合作:13146398132
媒体合作:13341147250
爆料投稿:editor@vrarworld.cn
版权声明:本文为VRAR星球原创,任何单位及个人未经授权不得转载,否则将依法追究侵权责任。
如需转载请联系13341147250 / editor@vrarworld.cn 申请授权,转载时请注明来源并保留VRAR星球原文链接。
本文部分图片及视频来源于互联网,如涉及侵权请联系我们删除。

PICO裁撤游戏工作室团队,日活前三VR音游全员被裁

PICO开始支持个人开发者自助上架+分发付费应用

PICO将在3月GDC上公开展示下一代头显:100克+4000 PPI+40 PPD,价格不菲

PICO推出企业级头显MDM平台

XR一周大事件:PICO架构重组,Meta确认Quest代理,双十一AR神仙打架
传PICO新头显PICO 4S将于今年下半年推出,配备12GB RAM

PICO视频新预告:3D穿越机带你飞掠绿野山居、地下迷窟、VR宇宙之旅第二季-宇宙射线

PICO 亮相 2023 ChinaJoy ,解锁VR互娱新玩法

锐评 | 高通、联发科、PICO想发贺电,Meta放弃自研XR芯片

《三体:远征》VR作品8月26日正式上线,还原原著“三体游戏”

闪极将在全国最大的万象城开设一家AI眼镜旗舰店

Halliday发布第二代AI眼镜:AI可实时参与会议

xMEMS宣布推出全球最小主动式微型风扇XMC-1200

Hololight更新企业级XR工具,用于流媒体播放和协作

动作战斗飞行模拟游戏《G-Rebels》登陆Steam,支持VR

NVIDIA发布Cosmos 3 Edge,一款面向物理AI的世界级模型
Unity宣布推出下一代平台“Unity 7”,早期beta测试将于12月开始

Xbox Game Pass Starter加入Meta Horizon+订阅服务

法国ENGO Eyewear完成500万欧元融资,将加速开发面向耐力运动员的AR眼镜
闪极将在全国最大的万象城开设一家AI眼镜旗舰店
Halliday发布第二代AI眼镜:AI可实时参与会议
xMEMS宣布推出全球最小主动式微型风扇XMC-1200
Hololight更新企业级XR工具,用于流媒体播放和协作
动作战斗飞行模拟游戏《G-Rebels》登陆Steam,支持VR
NVIDIA发布Cosmos 3 Edge,一款面向物理AI的世界级模型
Unity宣布推出下一代平台“Unity 7”,早期beta测试将于12月开始
Xbox Game Pass Starter加入Meta Horizon+订阅服务
法国ENGO Eyewear完成500万欧元融资,将加速开发面向耐力运动员的AR眼镜

关注微信公众号

扫码添加客服


