12月25日,虚拟动点“当‘空间计算’遇上‘具身智能’”暨技术成果发布日活动落下帷幕。活动汇聚石景山区政府领导、投资机构、合作伙伴、行业媒体等,共同见证虚拟动点技术成果的发布。
虚拟动点公司董事长兼CEO刘耀东,图源:虚拟动点
现场,虚拟动点董事长兼CEO刘耀东介绍了公司在具身智能领域的能力和业务布局,同时演示了基于数据、算法、服务等层面对人形机器人的赋能成果。刘耀东表示,虚拟动点不做机器人,而是赋能合作伙伴做更好的机器人。我们是机器人的头脑和眼睛,赋能机器人感知空间、决策行动、控制动作。
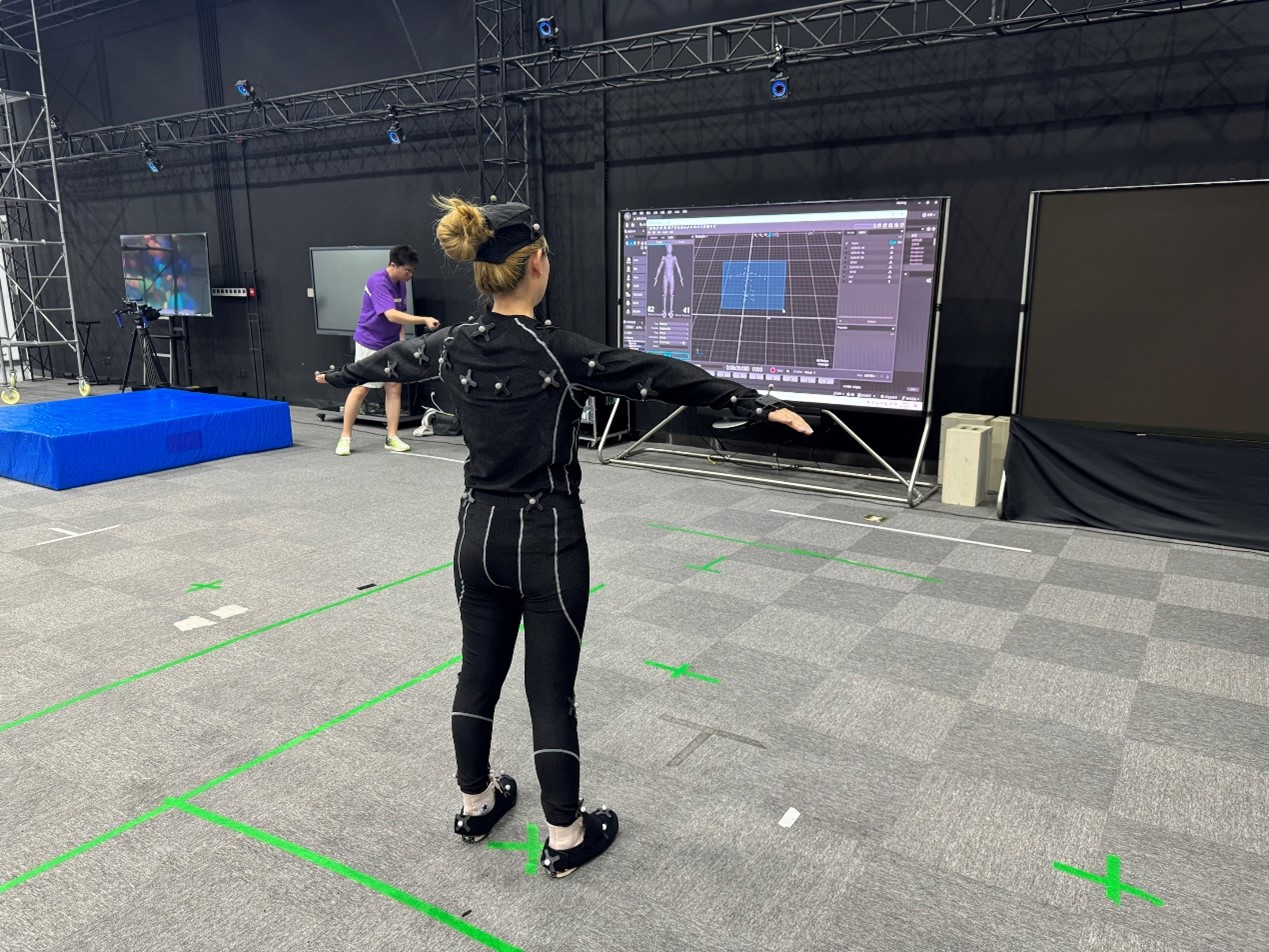
活动中,刘耀东向与会嘉宾演示了在虚拟动点空间计算赋能下,人形机器人具备的能力。基于虚拟动点无标记点识别算法,通过复刻技术人员的动作,现场驱动了数字人及机器人上肢动作同步。实现了无标记识别算法帮助机器人模仿学习。
而通过光学定位识别算法,机器人不仅实现了走、跑、挥手示意等动作,甚至能够“负重前行”为现场嘉宾带来惊喜环节。此外,依托虚拟动点动作大模型数据的训练,机器人为与会嘉宾献上了一段“美式恰恰”舞表演,让机器人具备了控制动作的能力。(新闻来源:虚拟动点)
商务合作:13146398132
媒体合作:13341147250
爆料投稿:editor@vrarworld.cn
版权声明:本文为VRAR星球原创,任何单位及个人未经授权不得转载,否则将依法追究侵权责任。
如需转载请联系13341147250 / editor@vrarworld.cn 申请授权,转载时请注明来源并保留VRAR星球原文链接。
本文部分图片及视频来源于互联网,如涉及侵权请联系我们删除。

DPVR RoboPilot让机器人遥操作沉淀为可学习数据

苹果公布WWDC 2024日程及设计奖入围名单,新增“空间计算”类别

对话Rokid:解开“空间计算”新答案,开启跨时代的交互体验

中国机器人吸尘器公司展示配备人工智能手臂的新品
“虚拟动点《黑神话:悟空》动作捕捉大揭秘闭门会”在京召开,VRAR星球记者亲身体验动捕技术

外媒热议中国机器人“新工种”:当工人戴上VR,人形机器人学会叠衣服了

XR内容艺术奖项NEWVIEW AWARDS 2024开放报名,新设空间计算类别
谷歌DeepMind推出新的机器人AI模型

空间计算初创公司Nucleus4D融资150万美元,利用3D高斯散射技术实现建筑世界的数字化
街机经典游戏《我,机器人》将于今年春季推出重置版,支持PS VR2


谷歌发布了视频生成AI“Gemini Omni Flash”,现可通过Gemini API使用

天马推出全球首款3.16英寸Micro-LED透明圆屏
谷东智能PVG研发取得新突破:光波导少一层,视场扩大到45°
智能隐形眼镜再进一步:XPANCEO深化与JBD显示合作,独角兽能否撬动“眼球计算”时代?

台湾光学双雄发布6月营收 今国光年增73%宣告AR眼镜进入放量期

Newline发布首款AI智能眼镜 NewGlasses 系列

Meta 被曝让外包人员伪装未成年人,诱导竞争对手 AI 聊敏感话题

《Suffer The Night》官宣不到两个月即遭“无限期搁置”

德国启动硅基Micro LED微显示联合研发项目,瞄准AR量产
谷歌发布了视频生成AI“Gemini Omni Flash”,现可通过Gemini API使用
天马推出全球首款3.16英寸Micro-LED透明圆屏
谷东智能PVG研发取得新突破:光波导少一层,视场扩大到45°
智能隐形眼镜再进一步:XPANCEO深化与JBD显示合作,独角兽能否撬动“眼球计算”时代?
台湾光学双雄发布6月营收 今国光年增73%宣告AR眼镜进入放量期
Newline发布首款AI智能眼镜 NewGlasses 系列
Meta 被曝让外包人员伪装未成年人,诱导竞争对手 AI 聊敏感话题
《Suffer The Night》官宣不到两个月即遭“无限期搁置”
德国启动硅基Micro LED微显示联合研发项目,瞄准AR量产

关注微信公众号

扫码添加客服


