编译 / VRAR星球 R星人
9月21日,PICO展示近期遭泄露的新手柄,并对外发布了其自研的Centaur多模态融合追踪算法。

图源:PICO
如前期谍照所示,PICO新手柄去掉了外围灯环的设计,并且没有额外增加传感器。据PICO官方透露,相比上一代手柄,新手柄重量减轻了约15g,高度减小了50%,并且还优化了内部电池和马达的位置,使其重心更靠近手心,握持手感更好,且兼具细腻振感。
通常,去掉包含LED灯的追踪灯环,势必会降低手柄的追踪精度和稳定性。而PICO全新自研的Centaur多模态融合算法,融合了光学追踪算法和CV模态手柄追踪算法,让手柄在LED灯减少或处于盲区的背景下,也能实时、有效追踪。
VR设备的轻量化和小型化,一直是XR行业探索和努力的方向。
基于当前行业主流的“光学追踪+惯性导航系统”追踪方案,开发无灯环手柄会面临两大技术难点:首先,减少LED灯的数量,会影响光学追踪的稳定性;其次,更少的LED观测数量,会增大手柄初始化与追踪解算难度。但如果在手柄上增加新的传感器,这又会提升造价成本,并增加手柄的耗电速率。
PICO全新自研的Centaur多模态融合追踪算法,将光学追踪算法和CV模态手柄追踪算法进行了有效融合。这不仅解决了无灯环手柄‘识别难’的问题,也为XR行业的追踪交互提供了新的思路。头显既能通过光学追踪算法识别手柄上LED灯发出的红外光,还能够在LED灯被手部遮挡时,通过CV模态追踪算法识别裸手的特征,从而准确还原出手柄控制器的6DoF信息。两大算法结合手柄本身具备的惯性导航系统,使得新手柄无需增加新的传感器,也能实现稳定、精准的追踪。
商务合作:13146398132
媒体合作:13341147250
爆料投稿:editor@vrarworld.cn
版权声明:本文为VRAR星球原创,任何单位及个人未经授权不得转载,否则将依法追究侵权责任。
如需转载请联系13341147250 / editor@vrarworld.cn 申请授权,转载时请注明来源并保留VRAR星球原文链接。
本文部分图片及视频来源于互联网,如涉及侵权请联系我们删除。

PICO效仿Meta Quest App Lab推出PICO Lab

据传PICO 5由于PICO 4销量不佳被取消,字节跳动将重点转向“空间计算”领域与苹果竞争

锐评 | Meta、PICO方向错了,高通、谷歌、三星要让手机振兴XR

2023 ChinaJoy 直击:高通、索尼、PICO携VR/AR新品跨界破圈

字节跳动正式宣布对PICO进行组织架构调整

开发者因接触PICO和苹果被Meta取消资助且拉黑
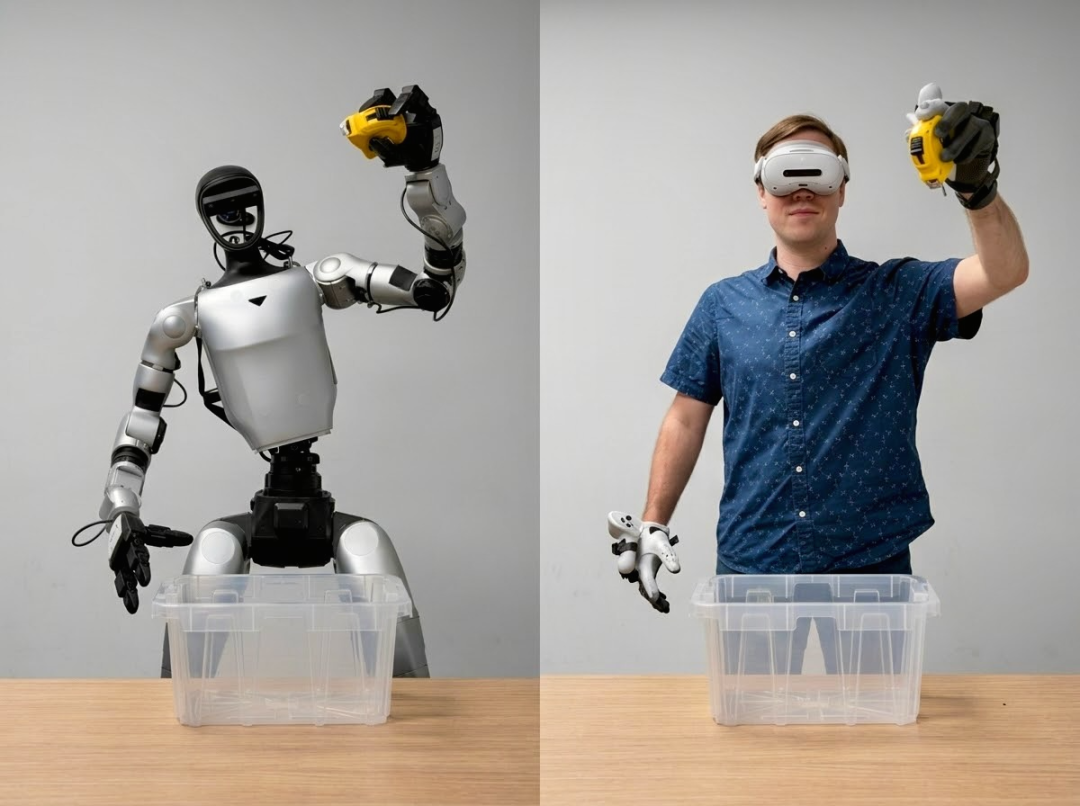
PICO与NVIDIA共同推出沉浸式机器人遥操作开源方案Isaac Teleop

提供免费游戏,PICO 4夏季推广活动开启

PICO与雅乐轩合作推出XR酒店体验

锐评 | 市场份额相差7%,大朋VR今年能够超过PICO吗?


三星首款AI眼镜Galaxy Glasses亮相:无屏显,长续航,强AI
闪极将在全国最大的万象城开设一家AI眼镜旗舰店

Halliday发布第二代AI眼镜:AI可实时参与会议
AI让健康触手可及|生生纪携 AI 心探、本若岚亮相 2026 世界人工智能大会

LumiMind亮相2026世界人工智能大会:从脑电技术到睡眠体验,探索神经科技消费化新路径

AR+AI走进真实场景,亮亮视野在WAIC展示系统化产业应用能力

端侧智能让穿戴设备更“懂你”

WAIC 2026爆款复盘:趣致集团Q-Gen引擎10分钟生成AI营销短剧,内容生产的“最后一公里”被踏平了

维信诺首次亮相ChinaJoy展会,OLED显示龙头加码数字娱乐新场景
三星首款AI眼镜Galaxy Glasses亮相:无屏显,长续航,强AI
闪极将在全国最大的万象城开设一家AI眼镜旗舰店
Halliday发布第二代AI眼镜:AI可实时参与会议
维信诺首次亮相ChinaJoy展会,OLED显示龙头加码数字娱乐新场景
数智赋能组织管理,莫界与北森达成生态战略合作

苹果Apple Park游客中心启动升级改造,AR展览区暂时关闭
多伦多大学研究:VR会扭曲人对自己身体尺寸的感知

华泰证券:AI眼镜有望成为AI Agent进入物理世界的高频入口
中日联合研究团队发明新型AR显示技术,可在提升现实世界可视性的同时保持虚拟物体的逼真度

关注微信公众号

扫码添加客服


